



- 您當(dāng)前的位置是:首頁 >人工智能產(chǎn)品 > 人工智能開發(fā)與應(yīng)用平臺
- 人工智能開發(fā)與應(yīng)用平臺
-

-
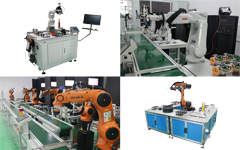
ROS移動與搬運機器人學(xué)習(xí)平臺eAI2620
產(chǎn)品型號:eAI2620
ROS移動與搬運機器人學(xué)習(xí)平臺eAI2620
- 詳細內(nèi)容
-
硬件參數(shù)
協(xié)作機器人本體
1、自由度:6自由度,;
2,、負(fù)載:5kg;
3,、臂展:954mm,;
4、軸運動范圍
A1:±360° 180°/s
A2:-85°,,+265° 180°/s
A3:±175° 180°/s
A4:-85°,,+265° 180°/s
A5:±360° 180°/s
A6:±360° 180°/s
5、重復(fù)精度:±0.05mm;
6,、編程方式:圖形化編程,、拖拽編程;
7,、示教器類型:PC,、移動終端(PAD/手機);
8,、工具端典型速度:3m/s,;
9、功耗:350W,;
10,、溫度范圍:0-50℃ ;
11,、IP等級:IP54,;
12、機器人安裝:任意角度安裝,;
13,、工具I/O端口:數(shù)字輸入2,數(shù)字輸出2,,模擬輸入1,;
14、工具I/O電源:24VDC,;
15,、材質(zhì):鋁合金、PC塑料,;
16,、重量:23kg。
機器人控制器
1,、IP等級:IP44;
2,、I/O端口:16個數(shù)字輸入及輸出,,2個模擬輸入或輸出;
3,、I/O電源:24V,;
4、通信標(biāo)配:TCP/IP, Modbus TCP, Modbus RTU,,Profinet,Ethernet/IP,;
5、電源:100-240VAC,50-60Hz;
6,、材質(zhì):不銹鋼合金,。
移動機器人
1、軸距 :498mm,;
2,、前/ 后輪距: 582/ 582mm;
3,、車體重量: 67±1kgKg,;
4、額定載重:50Kg,;
5,、電池類型:鋰電池 24V 30Ah;
6,、電機:直流無刷 4×400W,;
7、減速箱:1:40,;
8,、驅(qū)動形式:四輪獨立驅(qū)動;
9,、懸架:雙搖臂獨立懸架,;
10、轉(zhuǎn)向:四輪差速轉(zhuǎn)向,;
11,、安全裝備:伺服剎車/防撞管;
12,、空載最高車速: 1.5m/s,;
13、最小轉(zhuǎn)彎半徑:可原地轉(zhuǎn)彎,;
14,、最大爬坡能力:30°;
15,、最小離地間隙: 135mm,;
16、外形尺寸: 930mm×699mm×349mm,。
激光雷達
1,、接口類型:USB口;
2,、檢測距離:(白板測量)0.05m-25m,;10%反射率的反射面 8m ,;
3、絕對精度:Max:±25mm(0.05m~8m@10%漫反射面),;
4,、重復(fù)精度:Max:±25mm;
5,、掃描角度:270°,;
6、角度分辨率:0.33°,;
7,、掃描頻率:15Hz;
8,、激光波長:905nm,;
9、激光防護等級:1 級(人眼安全),;
10,、工作電源:5V;
11,、功耗:3W,;
12、防護等級:IP66,。
雙目相機
1,、Baseline:75mm;
2,、深度范圍:0.6-8m,;
3、相對精度:1m:±3mm,;
4,、深度圖分辨率:1280×1024(Max)
5、彩色圖分辨率:1920×1080(Max)
6,、數(shù)據(jù)傳輸:USB3.0 Type-C,;
7、適用場景:室內(nèi),;
8,、支持操作系統(tǒng):Android / Linux / Windows 7 & 10。
應(yīng)用開發(fā)案例
1,、ROS簡介與ROS開發(fā)環(huán)境搭建;
2,、ROS體系架構(gòu)及主要環(huán)境——文件系統(tǒng)介紹,;
3,、ROS體系架構(gòu)及主要環(huán)境——計算圖介紹;
4,、ROS體系架構(gòu)及主要環(huán)境——通信機制介紹,;
5、主題與服務(wù)介紹,;
6,、3D可視化工具介紹與使用;
7,、ROS機器人的SSH 訪問及基本配置,;
8、ROS機器人vi的基本使用,;
9,、ROS機器人基本移動控制(Python編程);
10,、ROS機器人角速度,、線速度校正;
11,、ROS機器人IMU的自動校正(Python編程),;
12、ROS機器人PID動態(tài)調(diào)試,;
13,、ROS機器人OpenCV_Apps圖形處理;
14,、ROS機器人視覺顏色,、形狀識別(Python編程);
15,、ROS機器人視覺條碼,、二維碼識別(Python編程);
16,、ROS機器人視覺文本,、數(shù)字識別(Python編程);
17,、ROS機器人視覺巡線(Python編程),;
18、ROS機器人雷達跟隨(Python編程),;
19,、ROS機器人激光雷達SLAM構(gòu)建地圖(Python編程與RVIZ使用);
20,、ROS機器人選擇區(qū)域自動構(gòu)建地圖(Python編程),;
21,、ROS機器人用Hector算法構(gòu)建地圖(Python編程);
22,、ROS機器人Karto算法構(gòu)建地圖(Python編程),;
23、ROS機器人多點導(dǎo)航(Python編程),;
24,、ROS機器人SLAM激光導(dǎo)航(Python編程);
25,、ROS機器人物料抓取與搬運(Python編程),;
26、基于視覺識別與機器人運動控制的垃圾分揀(Python編程),;
27,、ROS機器人安卓手機App控制與圖像監(jiān)控(Android編程);
28,、ROS機器人安卓手機App建地圖(Python編程與Android編程),;
29、ROS機器人安卓手機App導(dǎo)航(Python編程與Android編程),;
30,、協(xié)作機器人的認(rèn)知;
31,、協(xié)作機器人的機電系統(tǒng)認(rèn)知,;
32、協(xié)作機器人的控制系統(tǒng)認(rèn)知,;
33,、協(xié)作機器人示教編程實驗;
34,、協(xié)作機器人坐標(biāo)系變換控制實驗,;
35、協(xié)作機器人正運動學(xué)分析實驗,;
36,、協(xié)作機器人逆運動學(xué)分析實驗;
37,、協(xié)作機器人單關(guān)節(jié)位置控制實驗,;
38、基于 SDK 協(xié)作機器人控制編程實驗,;
39,、基于示教器的協(xié)作機器人示教搬運裝配實驗;
40,、基于拖動示教的協(xié)作機器人搬運裝配實驗,;
41,、基于 SDK 編程的協(xié)作機器人搬運裝配實驗;
42,、協(xié)作機器人的 Moveit 開發(fā)環(huán)境配置;
43,、協(xié)作機器人關(guān)節(jié)空間軌跡規(guī)劃實驗,;
44、協(xié)作機器人笛卡爾空間軌跡規(guī)劃實驗,;
45,、協(xié)作機器人手眼標(biāo)定實驗;
46,、協(xié)作機器人視覺引導(dǎo)的平面分揀實驗,。
