



- 您當前的位置是:首頁 >機器人與智能制造本科 > 智能制造
- 智能制造
-

-
工業(yè)互聯(lián)網(wǎng)(工業(yè)物聯(lián)網(wǎng))開發(fā)與實驗平臺
產(chǎn)品型號:開發(fā)實訓平臺
工業(yè)互聯(lián)網(wǎng)(工業(yè)物聯(lián)網(wǎng))是智能制造系統(tǒng)的重要組成部分,,現(xiàn)場總線與工業(yè)網(wǎng)絡(luò)是工業(yè)互聯(lián)網(wǎng)(工業(yè)物聯(lián)網(wǎng))的基礎(chǔ),。
- 詳細內(nèi)容
-
平臺簡介
工業(yè)互聯(lián)網(wǎng)(工業(yè)物聯(lián)網(wǎng))是智能制造系統(tǒng)的重要組成部分,現(xiàn)場總線與工業(yè)網(wǎng)絡(luò)是工業(yè)互聯(lián)網(wǎng)(工業(yè)物聯(lián)網(wǎng))的基礎(chǔ),。工業(yè)互聯(lián)網(wǎng)(工業(yè)物聯(lián)網(wǎng))開發(fā)與實驗平臺提供設(shè)備層,、平臺層,、應用層等三層架構(gòu)的軟硬件資源,并提供配套的開發(fā),、教學,、實驗、實踐等完整資源,,全部軟件,、硬件提供開源代碼和開放接口。現(xiàn)場總線均為符合國際標準的物理層,、數(shù)據(jù)鏈路層,、應用層三層模型總線,平臺采用國際主流現(xiàn)場總線與工業(yè)網(wǎng)絡(luò)系統(tǒng),便于開發(fā)者,、學習者掌握主流工業(yè)網(wǎng)絡(luò)與現(xiàn)場總線的技術(shù)及應用,,主要包括:PROFIBUS、CC-Link,、ControlNet等工業(yè)現(xiàn)場總線,,PROFINET、EtherCAT,、Modbus-RTPS等實時以太網(wǎng),。同時平臺包含感知設(shè)備、執(zhí)行單元,、無線傳感網(wǎng)絡(luò),、有線傳感網(wǎng)絡(luò)、工業(yè)主控單元,、工業(yè)云平臺,、工業(yè)大數(shù)據(jù)、工業(yè)互聯(lián)網(wǎng)APP等,。
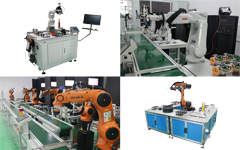
硬件組成
PLC模塊(2個),、機器人單元、二維運動控制單元,、數(shù)控系統(tǒng)單元(選配),、立體倉庫單元、物料傳送單元,、機器視覺檢測單元,、環(huán)境監(jiān)控單元、能源監(jiān)測單元,、邊緣計算平臺,、5G通訊模塊、工業(yè)以太網(wǎng)與現(xiàn)場總線模塊,、HMI工控屏,。
軟件組成
PLC監(jiān)控與通訊軟件、邊緣計算軟件,、視覺軟件、系統(tǒng)總控軟件,、工業(yè)大數(shù)據(jù)軟件,、工業(yè)云服務軟件、工業(yè)互聯(lián)網(wǎng)APP軟件,。
應用開發(fā)案例
1,、基于PROFINET的PLC主從通訊案例;
2,、基于TCP/IP 的HMI工控屏組網(wǎng)通訊案例,;
3,、基于Modbus-RTPS通訊空氣監(jiān)測案例;
4,、車間安防監(jiān)測案例,;
5、車間遠程電能計量案例,;
6,、車間震動監(jiān)測案例;
7,、伺服電機運動控制案例,;
8、步進電機運動控制案例,;
9,、遠程電子橫幅顯示系統(tǒng);
10,、立體倉庫物料存儲管理案例,;
11、機器人搬運碼垛案例,;
12,、基于機器學習的邊緣計算案例;
13,、基于深度學習的邊緣計算案例,;
14、視覺定位案例,;
15,、視覺識別案例;
16,、視覺分揀案例,;
17、視覺測量案例,;
18,、廠區(qū)綜合環(huán)境監(jiān)測案例;
19,、生產(chǎn)車間環(huán)境監(jiān)控案例,;
20、二維運動平臺控制案例,;
21,、物料傳送控制系統(tǒng)案例。
