



- 您當前的位置是:首頁 >機器人與智能制造本科 > 工業(yè)機器人與系統(tǒng)集成
- 工業(yè)機器人與系統(tǒng)集成
-

-
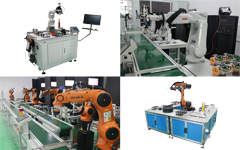
多功能工業(yè)機器人工作站Rbt3020
產(chǎn)品型號:Rbt3020
Rbt3020多功能工業(yè)機器人工作站為鋁合金導(dǎo)軌式實訓(xùn)臺上安裝垂直關(guān)節(jié)機器人,,該工作站可以自由拆分和配置不同的功能組成相對應(yīng)的產(chǎn)品,。
- 詳細內(nèi)容
-
產(chǎn)品介紹
Rbt3020多功能工業(yè)機器人工作站為鋁合金導(dǎo)軌式實訓(xùn)臺上安裝垂直關(guān)節(jié)機器人,該工作站可以自由拆分和配置不同的功能組成相對應(yīng)的產(chǎn)品,,系統(tǒng)各機構(gòu)采用了氣動驅(qū)動,、運動控制器和步進電機或伺服電機位置控制等技術(shù),。系統(tǒng)的控制方式由工控機承擔其控制任務(wù),輔以 PLC單元和觸摸屏完成組態(tài)聯(lián)動控制任務(wù),,各系統(tǒng)之間通過以太網(wǎng)通訊方式實現(xiàn)互連的分布式控制方式,。因此,該工作站綜合應(yīng)用了多種技術(shù)知識,,如機器人控制系統(tǒng),、機器視覺系統(tǒng)、氣動控制技術(shù),、機械技術(shù)(機械傳動,、機械連接等),、傳感器應(yīng)用技術(shù)、PLC 控制和組網(wǎng),、步進電機或伺服電機位置控制和變頻器技術(shù)等,,可以模擬一個與實際生產(chǎn)情況十分接近的控制過程,使學(xué)習者得到一個非常接近于實際的教學(xué)設(shè)備環(huán)境,,從而縮短了理論教學(xué)與實際應(yīng)用之間的距離,。
產(chǎn)品特點
1、以工業(yè)機器人實訓(xùn)為主體,,集成了視覺系統(tǒng)及自動化相關(guān)知識的綜合性實訓(xùn)平臺,;
2、可拆裝組合,,控制系統(tǒng)為可插拔式連接,,開放性好;機器人末端工具支持自動快速更換,;
3,、基礎(chǔ)功能:視覺系統(tǒng)實訓(xùn)、 井式下料及皮帶輸送實訓(xùn),、寫字繪圖模塊,、3D TCP練習及機器人基礎(chǔ)訓(xùn)練;
4,、特色功能:多種末端工具快換模塊,立體倉庫,,涂膠裝配,,視覺分揀;
5,、擴展區(qū)域:預(yù)留多個功能模塊安裝固定預(yù)付,,方便功能擴展;
6,、具有觸摸屏組態(tài)編程和人機交互編程,。
應(yīng)用領(lǐng)域
1、通用工業(yè)機器人學(xué)習與應(yīng)用,;
2,、工業(yè)機器人及視覺研究開發(fā);
3,、工業(yè)機器人實驗室及培訓(xùn)機構(gòu)應(yīng)用,。
系統(tǒng)組成及技術(shù)參數(shù)
1、緊湊型六自由度工業(yè)機器人本體,,標準配置為KUKA機器人(可選FUNAC,、ABB、安川、埃斯頓,、埃夫特,、圖靈等);
2,、視覺智能檢測系統(tǒng),;
3、多種末端工具快換模塊,;
4,、作業(yè)工件倉儲模塊2列2層4個;
5,、寫字繪圖模塊包括采用軟筆實現(xiàn)寫字繪圖,,可通過示教編程完成軌跡規(guī)劃,可通過離線編程完成軌跡規(guī)劃,;
6,、自動分揀功能包括固定式攝像頭模塊、分揀模塊,、分揀工裝盤,、料盒等;
7,、自動碼垛功能包括井式下料及皮帶輸送線模塊,、矩陣式碼垛盤、碼垛物塊若干等,;
8,、自動擰螺絲裝配系統(tǒng)組件;
9,、PLC及電氣控制系統(tǒng),;
10、觸摸屏組態(tài)編程和人機交互,;
11,、工業(yè)控制計算機。
應(yīng)用開發(fā)案例
1,、工業(yè)機器人控制氣動抓手抓取物體的上料實踐案例程序,;
2、工業(yè)機器人的TCP練習,、點位示教案例,;
3、工業(yè)機器人的寫字繪圖案例,;
4,、PLC電氣控制編程系列案例(氣動控制,、傳感器檢測、觸摸屏組態(tài),、工業(yè)通訊等),;
5、通過PLC控制傳輸帶案例程序,;
6,、基于工業(yè)機器人抓取運動傳輸帶上物體案例程序;
7,、基于工業(yè)機器人通過視覺精確抓取運動傳輸帶上的物體案例程序,;
8、基于工業(yè)機器人調(diào)整工件坐標完成矩陣碼垛案例程序,;
9,、基于工業(yè)機器人通過視覺完成精確插件案例程序;
10,、通過視覺單元完成矩陣工裝盤尺寸,、位置分析、計算距離案例程序,;
11,、基于工業(yè)機器人的全自動分揀系統(tǒng)設(shè)計案例;
12,、基于工業(yè)機器人的全自動插件系統(tǒng)設(shè)計案例,;
13、基于工業(yè)機器人的全自動碼垛系統(tǒng)設(shè)計案例,;
14,、基于工業(yè)機器人的立體倉庫系統(tǒng)設(shè)計案例;
15,、基于工業(yè)機器人的模擬涂膠系統(tǒng)設(shè)計案例;
16,、基于工業(yè)機器人的自動裝配系統(tǒng)設(shè)計案例,;
17、基于工業(yè)機器人的全自動擰螺絲系統(tǒng)設(shè)計案例,。
