



- 您當(dāng)前的位置是:首頁(yè) >機(jī)器人與智能制造本科 > 服務(wù)機(jī)器人
- 服務(wù)機(jī)器人
-

-
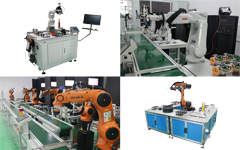
協(xié)作機(jī)器人開發(fā)與應(yīng)用平臺(tái)Rbt4100
產(chǎn)品型號(hào):Rbt4100
協(xié)作機(jī)器人開發(fā)與應(yīng)用平臺(tái)是一款專門為本科機(jī)器人專業(yè),、人工智能專業(yè)領(lǐng)域教學(xué)、科研等設(shè)計(jì)的機(jī)器人學(xué)習(xí)平臺(tái),。
- 詳細(xì)內(nèi)容
-
產(chǎn)品介紹
協(xié)作機(jī)器人開發(fā)與應(yīng)用平臺(tái)是一款專門為本科機(jī)器人專業(yè),、人工智能專業(yè)領(lǐng)域教學(xué)、科研等設(shè)計(jì)的機(jī)器人學(xué)習(xí)平臺(tái),,該平臺(tái)具有6個(gè)自由度的輕量型機(jī)器人,,重量輕、負(fù)載大,,并具有碰撞檢測(cè)功能,。控制系統(tǒng)具有C++,、Python,、ROS等SDK庫(kù);支持圖形界面編程,,C++,、Python等高級(jí)語(yǔ)言編程;支持示教開發(fā),、接口開發(fā),、控制器開發(fā)、驅(qū)動(dòng)器開發(fā),、自動(dòng)化開發(fā),、算法研究等應(yīng)用開發(fā)功能。
硬件參數(shù)
協(xié)作機(jī)器人本體
自由度:6自由度
負(fù)載:2kg
臂展:580mm
軸運(yùn)動(dòng)范圍
A1:±360°
A2:±125°
A3:±130°
A4:±360°
A5:±120°
A6:±360°
重復(fù)精度:±0.1mm
重量:10.5kg
編程方式:圖形化編程,、拖拽編程
示教器類型:平板電腦/手機(jī)APP(無(wú)線示教器)
機(jī)器人安裝:任意角度安裝
材質(zhì):鋁合金,、PC
機(jī)器人控制器
1、輸入電源:20-60VDC
2,、輸入電流:≤40A
3,、IP等級(jí):IP20
4、I/O端口:7路端口,,輸入輸出可配置
5,、I/O電源:24VDC
6、安裝方式:面板/導(dǎo)軌
7,、通信標(biāo)準(zhǔn):TCP/IP,Modbus TCP,Modbus RTU,Profinet,Ethernet/IP
8,、材質(zhì):鋁合金,、鋼
視覺系統(tǒng)
1、相機(jī):工業(yè)相機(jī)
2,、像素:130W像素
3,、分辨率:1280×960
4、像素尺寸:3.75μm×3.75μm
5,、光譜:彩色
6,、配套:同軸光源及光源控制器
機(jī)器人工作平臺(tái)
1、整個(gè)平臺(tái)采用立式結(jié)構(gòu),,電器柜可以安裝工控機(jī),、IO口擴(kuò)展板、電磁閥安裝位置,、變頻器安裝位置,、PLC安裝位置。
2,、電氣接線部分為抽屜式結(jié)構(gòu),,便于接線,預(yù)留擴(kuò)展區(qū)域,,便于設(shè)備的擴(kuò)展,。
3、工作平臺(tái)為可以靈活安裝各功能模塊的導(dǎo)槽式或矩陣螺絲孔式,。
4,、平臺(tái)面板為多用途可擴(kuò)展設(shè)計(jì)方式,擴(kuò)展靈活,。
5,、尺寸:1200mm×1000mm×900mm。
6,、材料:鋁合金+裝飾板,。
寫字繪圖組件
1、采用軟筆實(shí)現(xiàn)寫字繪圖,;
2、可通過(guò)示教編程完成軌跡規(guī)劃,;
3,、可通過(guò)離線編程完成軌跡規(guī)劃;
4,、配有筆形工具,。
氣動(dòng)夾具
1、氣動(dòng)夾具裝置
最大負(fù)載能力:2kg
氣動(dòng)夾爪行程:20mm
最高抓取精度:0.5mm
2,、氣動(dòng)吸盤裝置
最大負(fù)載能力:200g
吸盤直徑:20mm
彈性行程:10mm
搬運(yùn)碼垛組件
1,、搬運(yùn)碼垛組件是模擬工業(yè)場(chǎng)合的自動(dòng)搬運(yùn)碼垛功能設(shè)計(jì),,可以自動(dòng)記錄碼垛位置和高度,具有重復(fù)精度高,,自動(dòng)計(jì)算旋轉(zhuǎn)角度等功能,;
2、工業(yè)機(jī)器人工具盤上安裝了氣動(dòng)吸盤,;
3,、包含一個(gè)輸送帶,采用步進(jìn)電機(jī)驅(qū)動(dòng),;
4,、電機(jī)速度可以進(jìn)行調(diào)節(jié);
5,、可以實(shí)現(xiàn)將物料送到輸送帶上進(jìn)行定向傳送,;
6、具有傳感器能夠檢測(cè)模擬物料是否到達(dá)指定位置,。
自動(dòng)分揀插件組件
1,、該單元包含了原始物料區(qū)和分揀插件成品區(qū);
2,、工業(yè)視覺自動(dòng)判斷物塊類型,,工業(yè)機(jī)器人響應(yīng)分類過(guò)程,模擬了工業(yè)場(chǎng)合3C等電子行業(yè)的產(chǎn)品的分揀,,插件過(guò)程,;
4、具有1個(gè)分揀插件工裝盤,,對(duì)應(yīng)插裝分揀物料,;
5、物料為鋁合金或工程塑料,,大小為:φ23~37mm之間,;
6、捕獲識(shí)別物料范圍為:100×100mm之間,;
7,、精度:±0.5mm;
8,、配合視覺識(shí)別精度:99.8%,;
9、分揀吸嘴安裝在機(jī)器人末端,;
10,、配備圓形、三角形,、正方形,、六邊形料塊紅色和黃色各1套,,并且設(shè)置了1套黃色缺陷物料。
PLC系統(tǒng)
1,、工業(yè)領(lǐng)域應(yīng)用主流品牌,;
2、輸入輸出:總點(diǎn)數(shù)16(可擴(kuò)展),;
3,、支持結(jié)構(gòu)化程序和多個(gè)程序運(yùn)行、ST 語(yǔ)言,、FB 功能塊,;
4、內(nèi)置高速脈沖輸入4路,;
5,、內(nèi)置模擬量輸入2路;
6,、支持多種通訊協(xié)議,,可實(shí)現(xiàn)與觸摸屏、工業(yè)機(jī)器人,、機(jī)器視覺以及多臺(tái)PLC 間的通訊,。
觸摸屏
1、支持與PLC通訊,,可組態(tài),;
2、7寸及以上TFT真彩工控液晶顯示屏+觸摸屏,;
3,、分辨率 800×480,16M色,;
4,、內(nèi)置通訊接口類型滿足教學(xué)需求(PLC通信接口、網(wǎng)口,、卡槽,、USB口等);
5,、配套編程控制軟件,。
工業(yè)控制計(jì)算機(jī)
1、Intel I5處理器,;
2、8G或以上內(nèi)存,;
3,、120G或以上固態(tài)硬盤,;
4、21寸或以上液晶顯示器,;
5,、專用工控機(jī)箱;
6,、配套鍵盤,、鼠標(biāo)等外設(shè)。
應(yīng)用開發(fā)案例
開源實(shí)驗(yàn)案例
1,、協(xié)作機(jī)器人的認(rèn)知,;
2、協(xié)作機(jī)器人的機(jī)電系統(tǒng)認(rèn)知,;
3,、協(xié)作機(jī)器人的控制系統(tǒng)認(rèn)知;
4,、協(xié)作機(jī)器人示教編程案例,;
5、協(xié)作機(jī)器人坐標(biāo)系變換控制案例,;
6,、協(xié)作機(jī)器人正運(yùn)動(dòng)學(xué)分析案例;
7,、協(xié)作機(jī)器人逆運(yùn)動(dòng)學(xué)分析案例,;
8、協(xié)作機(jī)器人單關(guān)節(jié)位置控制案例,;
9,、基于 SDK 協(xié)作機(jī)器人控制編程案例;
10,、基于示教器的協(xié)作機(jī)器人示教搬運(yùn)裝配案例,;
11、基于拖動(dòng)示教的協(xié)作機(jī)器人搬運(yùn)裝配案例,;
12,、基于 SDK 編程的協(xié)作機(jī)器人搬運(yùn)裝配案例;
13,、協(xié)作機(jī)器人自動(dòng)擰螺絲案例,;
14、協(xié)作機(jī)器人的 Moveit 開發(fā)環(huán)境配置案例,;
15,、協(xié)作機(jī)器人關(guān)節(jié)空間軌跡規(guī)劃案例;
16,、協(xié)作機(jī)器人笛卡爾空間軌跡規(guī)劃案例,;
17,、協(xié)作機(jī)器人手眼標(biāo)定案例;
18,、協(xié)作機(jī)器人視覺引導(dǎo)的平面分揀案例,。
計(jì)算機(jī)視覺開源案例
1、視覺定位
1.1 原點(diǎn)視覺定位
1.2 裝配視覺定位
2,、視覺測(cè)量
2.1 距離與長(zhǎng)度測(cè)量
2.2 角度測(cè)量
2.3 圓弧與正圓,、橢圓測(cè)量
3、視覺識(shí)別
3.1 手機(jī)電池生產(chǎn)日期檢測(cè)
3.2 車牌及號(hào)碼檢測(cè)
3.3 條碼,、二維碼識(shí)別
3.4 物料形狀,、顏色識(shí)別
3.5 物料視覺識(shí)別與分揀
4、視覺檢測(cè)
4.1 零件缺陷檢測(cè)
4.2 產(chǎn)品質(zhì)量檢測(cè)
