



- 您當(dāng)前的位置是:首頁 >機(jī)器人與智能制造本科 > 服務(wù)機(jī)器人
- 服務(wù)機(jī)器人
-

-
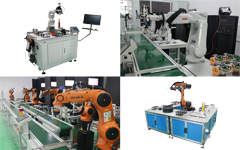
ROS工業(yè)級6軸機(jī)器人學(xué)習(xí)平臺eAI4600
產(chǎn)品型號:eAI4600
ROS工業(yè)級6軸機(jī)器人學(xué)習(xí)平臺是一款專門為機(jī)器人工程,、人工智能等專業(yè)領(lǐng)域教學(xué),、科研等設(shè)計的機(jī)器人學(xué)習(xí)平臺。
- 詳細(xì)內(nèi)容
-
產(chǎn)品介紹
ROS工業(yè)級6軸機(jī)器人學(xué)習(xí)平臺是一款專門為機(jī)器人工程,、人工智能等專業(yè)領(lǐng)域教學(xué),、科研等設(shè)計的機(jī)器人學(xué)習(xí)平臺,,該平臺可用于學(xué)習(xí)6自由度機(jī)器人基本結(jié)構(gòu)、運(yùn)動控制,、ROS系統(tǒng)及開發(fā),、Python編程、機(jī)器視覺,、機(jī)器人相關(guān)應(yīng)用等,。
整個機(jī)械臂采用模塊化組裝工藝,學(xué)生可以學(xué)習(xí)機(jī)械結(jié)構(gòu)設(shè)計,、電機(jī)驅(qū)動,、電子電路和機(jī)器人運(yùn)動學(xué),、運(yùn)動控制系統(tǒng)等各項專業(yè)知識。
硬件參數(shù)
機(jī)器人本體
最大負(fù)載:2kg
最大工作半徑:540mm
軸數(shù):6軸
重復(fù)精度:±0.06mm
軸運(yùn)動范圍:
(1)1軸:±170°
(2)2軸:±110°
(3)3軸:+40°至-220°
(4)4軸:±180°
(5)5軸:±120°
(6)6軸:±360°
機(jī)器人本體重量:28kg
機(jī)器人工作平臺
1,、整個平臺采用立式結(jié)構(gòu),,電氣柜采用抽屜式結(jié)構(gòu),抽屜平臺方便安裝IO口擴(kuò)展板,、電磁閥,、變頻器、PLC等各種電氣部件,;下方方便放置機(jī)器人控制箱及工控機(jī)等,。
2、工作平臺為多用途可擴(kuò)展設(shè)計方式,,可以靈活安裝各功能模塊的導(dǎo)槽式鋁型材結(jié)構(gòu),,平臺立柱可方便安裝鍵盤、顯示器支架,。
3,、尺寸:900mm×600mm×700mm。
4,、材料:鋁合金+裝飾板,。
機(jī)器人控制系統(tǒng)
控制器:ARM+FPGA
操作系統(tǒng):開源ROS系統(tǒng)
編程語言:C++、Python
通訊接口:RS232,、Ethernet,、I/O
電源:單相 AC 200V-230V,50-60Hz
額定功率:0.8KVA
視覺系統(tǒng)
1,、像素:130W像素
2,、分辨率:1280×960
3、光譜:彩色
4,、提供NI Vision 或OpenCV編寫的案例程序,,包括模板匹配、零件識別,、字符識別,、條碼識別、二維碼識別等,。
分揀,、搬運(yùn)、裝配系統(tǒng)
1,、井式下料系統(tǒng),,步進(jìn)電機(jī)控制。
2,、自動傳送系統(tǒng),,步進(jìn)電機(jī)傳送,。
3、傳送系統(tǒng)配備光電傳感器,,檢測傳送帶上物料位置,。
4、配合視覺系統(tǒng)定位物料準(zhǔn)確位置,,并進(jìn)行自動分揀,。
5、配合視覺,,進(jìn)行工件自動裝配,。
工業(yè)控制計算機(jī)
1、Intel I5處理器
2,、8G或以上內(nèi)存
3,、120G或以上固態(tài)硬盤
4、21寸或以上液晶顯示器
5,、專用工控機(jī)箱
6,、配套鍵盤、鼠標(biāo)等外設(shè)
氣源氣路
1,、采用無油靜音氣泵
2,、配有調(diào)壓過濾器、氣路等氣動元件
3,、排氣壓力:0.8Mpa
4,、理論流量:220L/min
5、儲氣罐容量:50L
6,、輸入功率:600W×2
7、輸入電壓:AC220V/50Hz
8,、噪音量:70dB
應(yīng)用開發(fā)案例
1,、ROS簡介與ROS開發(fā)環(huán)境搭建;
2,、ROS體系架構(gòu)及主要環(huán)境——文件系統(tǒng)介紹,;
3、ROS體系架構(gòu)及主要環(huán)境——計算圖介紹,;
4,、ROS體系架構(gòu)及主要環(huán)境——通信機(jī)制介紹;
5,、主題與服務(wù)介紹,;
6、3D可視化工具介紹與使用,;
7,、ROS機(jī)器人的SSH 訪問及基本配置,;
8、ROS機(jī)器人vi的基本使用,;
9,、ROS系統(tǒng)6軸機(jī)器人模型創(chuàng)建;
10,、ROS系統(tǒng)MoveIt,!的使用;
11,、ROS機(jī)器人基本移動控制,;
12、ROS機(jī)器人OpenCV_Apps圖形處理,;
13,、ROS機(jī)器人視覺顏色、形狀識別,;
14,、ROS機(jī)器人視覺條碼、二維碼識別,;
15,、ROS機(jī)器人視覺文本、數(shù)字識別,;
16,、ROS機(jī)器人字母卡視覺分揀;
17,、ROS機(jī)器人深度學(xué)習(xí)圖片卡視覺分揀,;
18、ROS機(jī)器人物料搬運(yùn),;
19,、ROS機(jī)器人物料視覺分揀;
20,、ROS機(jī)器人工件自動裝配,。
