



- 您當(dāng)前的位置是:首頁 >人工智能產(chǎn)品 > 人工智能開發(fā)與應(yīng)用平臺
- 人工智能開發(fā)與應(yīng)用平臺
-

-
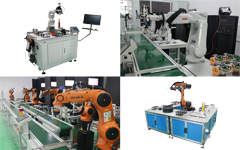
協(xié)作機器人開發(fā)與應(yīng)用平臺Rbt4120
產(chǎn)品型號:Rbt4120
協(xié)作機器人開發(fā)與應(yīng)用平臺是以協(xié)作機器人系統(tǒng),、計算機系統(tǒng),、視覺系統(tǒng),、PLC系統(tǒng)等為核心,,包含機器人模擬焊接、打磨,、碼垛,、裝配、搬運,、寫字繪畫等應(yīng)用功能,,以及智能倉儲系統(tǒng)、自動傳送系統(tǒng),、快換工具,、傳感技術(shù)、機器視覺技術(shù)等功能單元及技術(shù),,是學(xué)習(xí)智能機器人編程與應(yīng)用,、人工智能技術(shù)、機器視覺技術(shù),、PLC控制技術(shù),、傳感技術(shù)等多種技術(shù)的多功能實訓(xùn)平臺。
- 詳細(xì)內(nèi)容
-
產(chǎn)品介紹
協(xié)作機器人開發(fā)與應(yīng)用平臺是以協(xié)作機器人系統(tǒng),、計算機系統(tǒng),、視覺系統(tǒng),、PLC系統(tǒng)等為核心,包含機器人模擬焊接,、打磨、碼垛,、裝配,、搬運、寫字繪畫等應(yīng)用功能,,以及智能倉儲系統(tǒng),、自動傳送系統(tǒng)、快換工具,、傳感技術(shù),、機器視覺技術(shù)等功能單元及技術(shù),是學(xué)習(xí)智能機器人編程與應(yīng)用,、人工智能技術(shù),、機器視覺技術(shù)、PLC控制技術(shù),、傳感技術(shù)等多種技術(shù)的多功能實訓(xùn)平臺,。
主要單元
協(xié)作機器人本體
機器人控制器
視覺智能檢測系統(tǒng)
PLC系統(tǒng)
觸摸屏
工業(yè)控制計算機
3D曲面TCP練習(xí)組件
寫字繪圖組件
工具快換組件
井式自動下料組件
裝夾定位組件
分揀皮帶輸送線組件
分揀存儲組件
旋轉(zhuǎn)料倉組件
硬件參數(shù)
協(xié)作機器人本體
1、自由度:6自由度,;
2,、負(fù)載:5kg;
3,、臂展:954mm,;
4、軸運動范圍
A1:±360° 180°/s
A2:-85°,,+265° 180°/s
A3:±175° 180°/s
A4:-85°,,+265° 180°/s
A5:±360° 180°/s
A6:±360° 180°/s
5、重復(fù)精度:±0.05mm,;
6,、編程方式:圖形化編程、拖拽編程,;
7,、示教器類型:PC、移動終端(PAD/手機),;
8,、工具端典型速度:3m/s;
9,、功耗:350W,;
10,、溫度范圍:0-50℃ ;
11,、IP等級:IP54,;
12、機器人安裝:任意角度安裝,;
13,、工具I/O端口:數(shù)字輸入2,數(shù)字輸出2,,模擬輸入1,;
14、工具I/O電源:24VDC,;
15,、材質(zhì):鋁合金、PC塑料,;
16,、重量:23kg。
機器人控制器
1,、IP等級:IP44,;
2、I/O端口:16個數(shù)字輸入及輸出,,2個模擬輸入或輸出,;
3、I/O電源:24V,;
4,、通信標(biāo)配:TCP/IP, Modbus TCP, Modbus RTU,Profinet,Ethernet/IP,;
5,、電源:100-240VAC,50-60Hz;
6,、材質(zhì):不銹鋼合金,。
機器人工作平臺
1、整個平臺采用立式結(jié)構(gòu),,鈑金框架,,鋁型材鋪面。
2,、材料:鋁合金+碳鋼板,。
3、平臺上安裝機器人及功能單元,,工作平臺為可以靈活安裝各功能模塊的導(dǎo)槽式結(jié)構(gòu),。平臺下集成電氣安裝空間,,可以放置機器人控制柜、工控機,、電源,、PLC、以及其它電路氣路元件,。
4,、電氣接線部分為抽屜式結(jié)構(gòu),便于接線,,預(yù)留擴展區(qū)域,便于設(shè)備的擴展,。
5,、尺寸:1600mm×1200mm×800mm。
6,、平臺面板為多用途可擴展設(shè)計方式,,擴展非常靈活。
視覺智能檢測系統(tǒng)
1,、視覺智能檢測系統(tǒng),,主要是配合工業(yè)機器人實現(xiàn)智能檢測工件角度缺陷及自動對位等,以及工業(yè)機器人視覺學(xué)習(xí)開發(fā)使用,;
2. 工業(yè)相機
2.1 像素:130W像素,;
2.2 分辨率:1280×960;
2.3 像素尺寸:3.75μm× 3.75μm,;
2.4 光譜:彩色,;
2.5 工業(yè)鏡頭,f=16mm ,, C-Mount 接口,;
2.6 配套光源及光源控制器;
2.7 提供NI Vision 或OpenCV編寫的案例程序,,包括模板匹配,、零件識別、字符識別,、條碼識別,、二維碼識別等。
PLC系統(tǒng)
1,、工業(yè)領(lǐng)域應(yīng)用主流品牌,;
2、輸入輸出:總點數(shù)16(可擴展),;
3,、支持結(jié)構(gòu)化程序和多個程序運行,、ST 語言、FB 功能塊,;
4,、內(nèi)置高速脈沖輸入4路;
5,、內(nèi)置模擬量輸入2路,;
6、支持多種通訊協(xié)議,,可實現(xiàn)與觸摸屏,、工業(yè)機器人、機器視覺以及多臺PLC 間的通訊,。
觸摸屏
1,、支持與PLC通訊,可組態(tài),;
2,、7寸及以上TFT真彩工控液晶顯示屏+觸摸屏;
3,、分辨率 800×480,,16M色;
4,、內(nèi)置通訊接口類型滿足教學(xué)需求(PLC通信接口,、網(wǎng)口、卡槽,、USB口等),;
5、配套編程控制軟件,。
工業(yè)控制計算機
1,、Intel I5處理器;
2,、8G或以上內(nèi)存,;
3、120G或以上固態(tài)硬盤,;
4,、21寸或以上液晶顯示器;
5,、專用工控機箱,;
6、配套鍵盤,、鼠標(biāo)等外設(shè),。
應(yīng)用開發(fā)案例
1,、機器人基礎(chǔ)知識及手動操作;
2,、機器人的 I/O 介紹與配置,;
3、機器人程序數(shù)據(jù)介紹與設(shè)定,;
4,、機器人程序編寫;
5,、機器人的總線通訊,;
6、機器人3D曲面 TCP 練習(xí),;
7,、機器人寫字、繪圖,;
8、機器人搬運,;
9,、機器人的上下料(搬運);
10,、機器人涂膠與裝配,;
11、氣動執(zhí)行部件的控制,;
12,、氣動檢測部件信號檢測;
13,、輸送線的控制(步進(jìn)電機控制),;
14、機器視覺識別,;
15,、機器人視覺分揀;
16,、機器人自動擰螺絲裝配,;
17、智能立體倉庫(庫位檢測,、管理),;
18、機器人快換工具管理(工藝邏輯),;
19,、PLC編程與設(shè)計,;
20、HMI編程與設(shè)計,;
21,、總線通訊實訓(xùn);
22,、自定義實驗實訓(xùn),。
計算機視覺開源案例
1、視覺定位
1.1 原點視覺定位
1.2 裝配視覺定位
2,、視覺測量
2.1 距離與長度測量
2.2 角度測量
2.3 圓弧與正圓,、橢圓測量
3、視覺識別
3.1 手機電池生產(chǎn)日期檢測
3.2 車牌及號碼檢測
3.3 條碼,、二維碼識別
3.4 物料形狀,、顏色識別
3.5 物料視覺識別與分揀
4、視覺檢測
4.1 零件缺陷檢測
4.2 產(chǎn)品質(zhì)量檢測
